Un logiciel pour la robotisation et l’empilage des wagons de four
[ avril 2011 ]
Keller HCW a développé un nouveau logiciel qui permet de créer des programmes de robotisation sans avoir une connaissance particulière en programmation informatique. Aujourd’hui les robots ont beaucoup de fonctions dans les briqueteries. Chaque nouveau format de brique demande un nouveau programme du robot. Il est en conséquence important de pouvoir créer simplement ces nouveaux programmes avec le logiciel et en même temps de pouvoir visualiser réellement en 3D les empilages des wagons de four. Dans une simulation, les paquets de briques sont visualisés sur le wagon de four. Ensuite cette simulation peut être implémentée dans le pupitre de commande pour visualiser graphiquement les cycles du robot.
Pour ce faire, pas besoin de beaucoup de matériel. Avec le robot et l’automate API, on a seulement besoin d’un pupitre de commande équipé d’un écran tactile de 19’’ et d’un ordinateur avec le logiciel K-matic Visual Robotics. L’ordinateur est relié au robot, à l’automate API et au pupitre de commande via un câble réseau.
Une utilisation du programme pour plusieurs opérations
Le programme mis au point par Keller peut être utilisé de façons multiples. Il a été, certes, conçu pour l’empilage des wagons de four avec robots, mais il est également possible de l’utiliser sans problème pour le déchargement, l’emballage, le côté humide et le côté sec. Il est également possible de contrôler par robot de petites lignes d’empilage ou de grandes avec plusieurs robots.
Le programme est utilisé en deux étapes : celle de la planification et celle de la mise en service. Au début, l’empilage du wagon de four est créé sur un ordinateur de bureau sur un grand écran 24’’ 16/9. Durant l’étape de la mise en service, le programme peut aussi être activé du pupitre de commande pour la réalisation des derniers calibrages, c’est à dire que les programmes des robots peuvent être modifiés aussi rapidement du pupitre de commande que les autres réglages.
Création de nouveaux empilages des wagons de four
La démarche habituelle est de prendre un empilage existant, de le copier et de l’adapter. Il est aussi possible de créer un empilage des wagons de four complètement nouveau. Il faut commencer par créer la brique: hauteur, longueur, largeur et caractéristiques des surfaces de la brique sont saisies. Ensuite, l’empilage à prendre par le robot est à son tour créé. C’est une fonction clé du programme. Les empilages peuvent être composés individuellement. Au final, l’empilage des wagons du four est créé à partir de l’empilage des briques pour le robot et la suite dépend de la manière dont le robot dépose l’empilage sur les wagons de four.
Essais de l’empilage des wagons de four par simulation
Quand l’empilage des wagons de four est créé, il est possible de le visualiser par une simulation qui permet de vérifier, par exemple si les distances sont toutes correctes ou si la séquence des cycles du robot est, elle aussi, correcte.
En activant la fonction simulation du logiciel, les chargements de briques sont affichés en vert ou rouge sur les empilages des wagons de four. Si tous les empilages sont verts, tout est correct. Si un empilage est affiché en rouge, une fenêtre s’ouvre en affichant le message d’erreur avec une description exacte de l’erreur. Le logiciel distingue des erreurs par recouvrements des briques. Il évite donc que le robot dépose les couches de briques supérieures trop bas par rapport aux briques de la rangée du dessous.
Image 3D des cycles
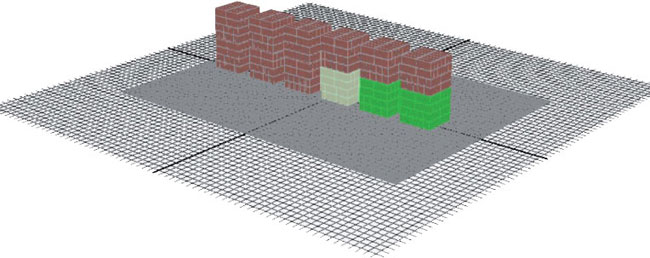
Sans les images des cycles visibles à partir du pupitre de commande, l’opérateur de la ligne d’empilage ne peut prédire, sauf avec beaucoup d’expérience, où le robot va déposer la charge. Souvent au pu pitre de commande, seul le numéro du cycle est affiché, ce qui est parfois assez peu compréhensible. Désormais, avec la visualisation des images des cycles affichées sur le pupitre de commande, il est facile de comprendre ce que le robot a fait jusque-là et ce que le robot va faire lors de la prochaine opération. Comme on peut voir sur la vue, les empilages verts sont les empilages qui ont déjà été chargés sur le wagon de four, l’empilage affiché en vert clair est, lui, en train d’être déposé et les empilages en brun n’ont pas encore été déposés. Si les briques d’un empilage du robot présentent des défauts et tombent de la pince, s’affiche immédiatement l’endroit où il faut changer les briques. Pour créer les images des cycles, il faut simplement presser un bouton sur l’interface opérateur du logiciel, les images seront alors créées et envoyées vers le pupitre de commande.
Mise en service des nouveaux programmes de robots
La transmission des données du robot est déclenchée par un clic de souris sur un bouton de transmission vert. En même temps le programme de l’automate API transmet le numéro du format de la brique et il mémorise tous les numéros de format transmis, si plusieurs formats de brique sont créés ou modifiés.
L’API avertit l’opérateur au pupitre de commande si de nouveaux formats seront sélectionnés. La vitesse du robot est abaissée à une vitesse de mise en service très lente qui peut être augmentée par l’opérateur selon le besoin. La transmission des formats qui doivent être produits ne s’effectue que lorsque l’installation est à l’arrêt. Pour cela, l’opérateur doit mettre hors service la fonction automatique.
Une attention particulière a été portée à la sécurité du logiciel. Si des empilages doivent être légèrement déplacés pendant la mise en service, le programme est ouvert, sur le pupitre de commande et les nouvelles valeurs ajustées y sont modifiées. Puis l’automatisation peut être remise en service. De cette façon, les modifications des formats peuvent être apportées indéfiniment jusqu’à ce que le résultat souhaité soit atteint. Il est également possible d’effectuer des modifications à partir du bureau puisque le pupitre de commande et le poste de travail au bureau ont l’accès aux mêmes données. Notons que la télémaintenance via internet est aussi possible.
Récupération des données
En cas de modifications des formats directement effectuées sur le robot, les données peuvent également être transmises à l’ordinateur. « Après les premiers essais avec notre propre robot de formation, nous avons complété l’équipement en fonction de certains souhaits des clients, surtout pour la retransmission des données du robot vers l’ordinateur» indique le bureau d’études de Keller HCW.
Utilisable pour tous les autres robots d’une briqueterie
Si ce système a principalement été conçu pour les fonctions d’empilage et de dépilage, les développeurs du logiciel ont prévu qu’il puisse être utilisé par tous les autres robots d’une briqueterie programmés avec une simple interface. Autre avantage, un seul ordinateur équipé avec le logiciel K-matic Visual Robotics est nécessaire pour alimenter tous les robots avec de nouveaux formats de briques. Les pupitres de commande des robots ont accès à cet ordinateur. lors de la mise en service des nouveaux formats de briques. La base des données centrale mène en outre à une augmentation de la sécurité des données.